Archive for August, 2008

- 1. Robot hanya 1 (satu) unit yang boleh bertanding dan memiliki dimensi panjanglebar maksimum (30×30)cm ketika berada dalam posisi START di HOME POSITION dengan berat dan tinggi tidak dibatasi.
- 2. Robot boleh merubah dimensinya melebihi ukuran pada (a) selama pertandingan tetapi tidak boleh melakukan separasi (pemisahan) menjadi lebih dari satu robot ataupun melepas bagian robotnya di lapangan pertandingan.
- 3. Sistem pemadam api (lilin) tidak boleh menggunakan cairan, gas dan semacamnya. Sistem yang diperkenankan hanya yang menggunakan semburan udara kering seperti kipas atau pneumatik.
- 4. Sistem pengangkat boneka bayi boleh menggunakan teknik-teknik robot tangan atau teknik lain yang mungkin.
- 5. Robot boleh menggunakan berbagai teknik gerak yang mungkin, termasuk sistem roda atau kaki.
- 6. Bentuk robot ketika START dan bertanding divisualisasikan dalam Gambar 1 berikut ini.

-
7. Besar Tegangan yang digunakan di rangkaian elektronik dan motor robot dibatasi maksimum 24 Volt.
-
8. Robot harus dapat berjalan sendiri secara autonomous tanpa perintah dari luar, dan oleh karena itu dilarang menggunakan sistem RF (radio frequency) seperti bluetooth, wifi dan semacamnya atau sistem komunikasi optik.
-
9. Sistem Power Supply robot HARUS di-ON-kan dengan menggunakan hanya SATU SWITCH saja.
-
10. Sistem START robot HARUS menggunakan SATU TOMBOL PUSH BOTTON yang berada di tubuh robot dan mudah dijangkau. Tombol lain yang diperkenankan ada hanyalah TOMBOL RESET
Lapangan Pertandingan :
Lapangan Pertandingan ditunjukkan dalam Gambar 2 berikut ini.

Gambar 2. Lapangan Lengkapn Tampak Atas
Keterangan Tambahan:
- 1. Lantai lapangan berwarna hijau gelap.
- 2. Lantai lapangan adalah RATA tanpa halangan (obstacle), kecuali pada posisi yang bertanda gambar .
- 3. Tiap kotak berukuran (50×50)cm diukur dari tengah dinding setebal 1.8-2 cm setinggi 25cm.
- 4. Sisi dinding berwarna putih.
- 5. Atas dinding berwarna hitam.
- 6. Semua dinding rata tanpa asesori.
- 7. Tanda H adalah Posisi START Robot di MERAH ataupun BIRU.
- 8. Lambang H berwarna putih.
- 9. Batas tiap kotak (50×50)cm tidak bergaris.
- 10. Posisi Boneka Bayi terhadap dinding adalah seperti Gambar 3 berikut ini:

Gambar 3. Penempatan Boneka
- 11. Boneka diletakkan di atas tempat berbentuk silinder kayu pejal berwarna hijau yang ditanam tetap di lantai (ukuran; perhatikan Gambar 3).
- 12. Posisi lilin terhadap dinding pojok adalah seperti Gambar 4 berikut (kecuali untuk lilin pada posisi gambar 4 jaraknya adalah 2 cm dari dinding terdekat):

Gambar 4. Penempatan Lilin
• Tempat lilin ditanam tetap (kuat) di lantai dengan cara disekrup, terbuat dari kayu.
• Lilin diletakkan di atas kayu tertanam di lubang tengahnya sedalam lebih dari 2 cm, lilin mudah patah jika ditubruk langsung.


Pembuatan PCB
Author: susan Dalam pembuatan PCB melalui beberapa tahap, yaitu :
- Penyusunan Komponen
- Penggambaran Rancangan Jalur
- Menuangkan Rancangan Jalur ke PCB
- Penyempurnaan PCB
- Pemasangan Komponen dan Penyolderan
- Penyempurnaan
Penyusunan Komponen
Penyusunan komponen disini adalah penyusunan komponen menggunakan software PCB layout editor. software ini sendiri ada yang free dan ada juga yang bayar. Contoh editor PCB yang dapat digunakan adalah
- Express PCB

- Eagle

- FreePCB

- Rimu PCB

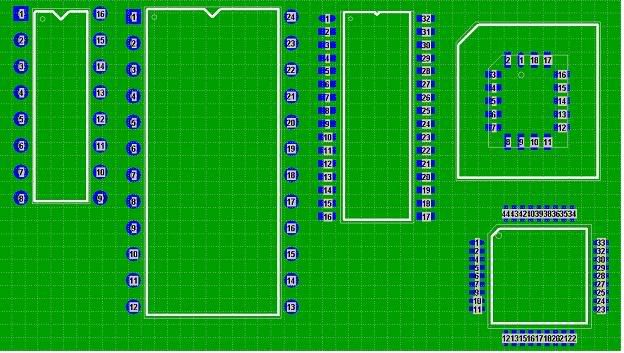
Pertama sekali harus mengenal alat yang akan dibuat, setidaknya harus menetapkan ukuran maksimal sehingga dapat di tentukan ukuran PCB Maksimal. Sebelum menyusun setidaknya harus di kenal komponen-komponen yang akan digunakan, termasuk ukuran dan sifat-sifatnya seperti ketahanan panas. Dimana komponen-komponen yang mudah panas di berikan jeda untuk tempat memasang heatsink.
Dalam penyusunan Komponen, usahakan komponen yang biasa di buka pasang dan gampang rusak di letakkan di pinggir. Cara ini berguna agar bila terjadi kerusakan komponen ataupun penggantian komponen dapat dengan mudah di lakukan. Termasuk untuk mencabut dan memasang komponen kembali dan juga yang menggunakan socket ataupun tidak.
Letakkan komponen-komponen yang sama searah agar pada saat pemasangan komponen tidak bingung mengenai arah. Hal seperti ini dilakukan dalam peletakkan IC juga transistor. Selain memudahkan dalam pemasangan ataupun melepaskan, disini juga terletak nilai seninya.
Dalam peletakkan komponen yang keciilpun dapat dengan berbagai cara. Seperti komponen resistor tabung dan diode yang biasanya mempunyai fisik yang memanjang ramping bias di letakkan berdiri.
Dan perlu diingat kempabali penyusunan komponen harus di sesuaikan dengan ukuran PCB, dan juga jangan terlalu rapat, agar mudah dalam pengambilan data atupun analisa.
Penggambaran Rancangan Jalur
Dalam pengambaran jalur, komponen-komponen yang mempunyai nomor pin dan juga mempunyai kutub footprintnya harap ditandai. Hal ini di maksudkan agar tidak terbalik dalam pemasangan komponen.
Dalam pengambaran jalur lebar garis jalur dan jarak antar jalur usahakan seefektif mungkin, ini di maksdukan agar mudah dalam pelunturan jalur yang tidak dipakai dan penyolderan mudah dilakukan. Dan bila terdapat jeda yang besar usahakan di isi, bias berhubungan dengan jalur ataupun lepas dari jalur.
Misalnya akan di buat rangkaian Multivibrator
Dalam pengambaran jalur lebar garis jalur dan jarak antar jalur usahakan seefektif mungkin, ini di maksdukan agar mudah dalam pelunturan jalur yang tidak dipakai dan penyolderan mudah dilakukan. Dan bila terdapat jeda yang besar usahakan di isi, bias berhubungan dengan jalur ataupun lepas dari jalur.
Misalnya akan di buat rangkaian Multivibrator
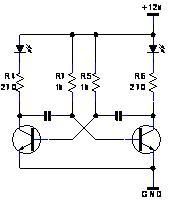
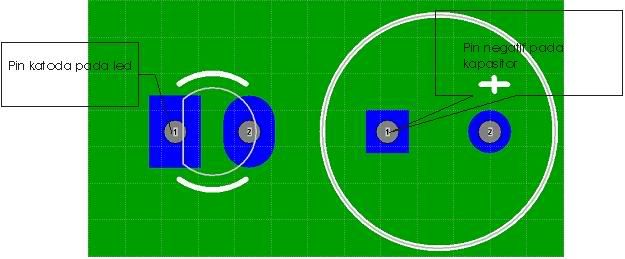
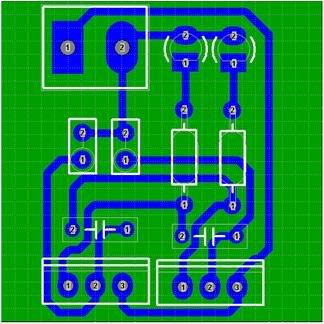
Pada rangkain multifibrator ini akan dibuat rangkaian dengan luas PCB 3X3 cm. Lalu komponen disusun serapi mungkin dan seefisien mungkin.
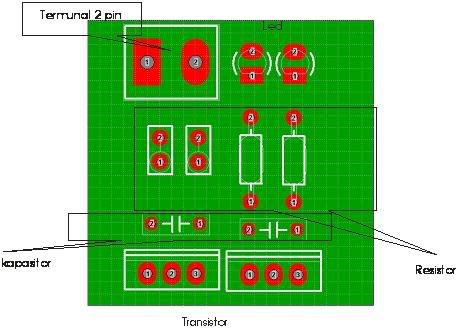
Pada penyusunan komponen diatas, pin led untuk katoda berbentuk kotak, dan terminal 2 pin untuk ground berbentuk kotak. Peletakkan resistor 2 buah resistor diletakkan tidur dan 2 buah resistor diletakkan berdiri. Resistor yang diletakkan tidur dimaksudkan agar diantara pin resistor bias di lewati jalur, dan resistor yang diletakkan berdiri maka antara pin tidak akan di lewatkan jalur.
Lalu jalur PCB digambar seegisien mungkin. Pada rangkaian ini lebar jalur PCB yang saya gunakan adalah 0.7 cm.
Sampai disini penggambaran PCB sebenarnya sudah selesai. Tetapi dapat dilihat banyak sekali space yang masih kosong. Kelemahan dari gambar PCB ini, pada saat melunturkan PCB akan berlansung lama, mengingat banyak space yang akan di lunturkan pula, ini mempunyai resiko jalur yang akan di gunakan akan terangkat pula. Untuk ini dapat di lakukan penutupan pada jalur yang tidak dipakai.
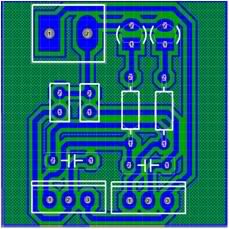
sampai disini perancangan jalur sudah selesai
Hasil Evaluasi Proposal IJE Robocon 2008
Author: Admin Web Saat terima informasi dengan subject “Tawaran dan Undangan keikutsertaan dalam IJE Robocon 2008” dimana tujuan dari kegiatan tersebut untuk memperingati ulangtahun ke 50 kerjasama Indonesia-Jepang (Japan International Cooperation Agency).
IJE Robocon 2008 adalah Indonesia - Japan Expo Robot Contes 2008 yang pastinya hanya diikut oleh tim-tim dari perguruan tinggi dari Indonesia dan Japan. Karena sifatnya pertandingan dengan tema “Api-Api Persahabatan” yang ditandai kerja sama Indonesia dan Jepang, dimana JICA dengan Politeknik Elektro Negeri Surabaya akan mengadakan IJE (Indonesia Japan Expo) Robocon 2008 pada 9 Nopember 2008 di Jakarta International Expo.
Kontes ini akan diikuti oleh 10 tim dari Indonesia ketentuan tim peserta dari Indonesia dipilih dari 10 institusi/perguruan tinggi yang memiliki prestasi terbaik dalam KRCI 2008 yang lalu. Awalnya Gunadarma tidak termasuk dalam listing institusi yang di undang oleh panitia IJE Robocon 2008. Karena diberikan kesempatan untuk mengirimkan proposal dengan menggantikan tim-tim yang tidak dapat ikut dalam kegiatan tersebut.
Berikut ini adalah institusi peserta IJE Robocon 2008 tertanggal 25 Agustus 2008
- Berdasarkan konfirmasi keikutsertaan dalam IJE Robocon 2008 per 22 Agustus 2008, maka calon peserta resmi dari Indonesia berdasarkan undangan tanggal 6 Agustus 2008 adalah sebagai berikut:
- 1. Universitas Indonesia (UI)
- 2. Universitas Gajah Mada (UGM)
- 3. Politeknik Negeri Bandung (POLBAN)
- 4. Politeknik Caltex Riau (PCR)
- 5. Institut Teknologi Sepuluh Nopember Surabaya (ITS)
- 6. Universitas Brawijaya
- 7. Universitas Surabaya (UBAYA)
- 8. Politeknik Elektronika Negeri Surabaya
- Berdasarkan proposal yang diterima oleh panitia per 22 Agustus 2008 dua slot peserta lokal yang tersedia akan diisi oleh:
- 9. Universitas Gunadarma
- 10. STMIK Multi Data Palembang
Sedangkan peserta dari Jepang akan dipilih 2 institusi yang masuk dalam kategori kampiun robocon di Jepang adalah;
- 1. Kizarasu National College of Technology (tentative) JEPANG
- 2. Kumamoto National College of Technology (tentative) JEPANG’
Listing peserta IJE ROBOCON 2008 disini
Untuk mahasiswa Gunadarma yang tertarik dengan robotika, silahkan bergabung untuk mempersiapkan tim Robot Gunadarma dan berprestasi di ajang tersebut. Buktikan kalo UG-ers punya mahasiswa yang dapat berprestasi di bidang Robotika.
Arsip : Undangan Keikutsertaan IJE Robocon 2008
Author: Admin Web Dibawah ini Arsip sebagai Undangan keikutsertaan tim Robot Universitas pada Indonesia Japan Expo dari Panitia IJE Robocon 2008
Assalaamu Alaikum dan Salam Sejahtera,
Yth. Purnawarman Musa (Universitas Gunadarma - Jakarta)
Abdul Rahman ( STMIK Multi Data Palembang)
Berdasarkan proposal keikutsertaan yang Saudara-saudara kirim ke panitia IJE Robocon 2008, dan mengingat tersedia dua slot keikutsertaan yang bisa diisi karena yang terundang sebelumnya mengundurkan diri, maka dengan ini kami mengundang Tim Saudara untuk berpartisipasi dalam IJE Robocon 2008 yang akan diselenggarakan pada 9 Nopember 2008 (jadwal lengkap seperti dalam Rule Book).
Untuk tertib administrasi, mohon segera memberikan konfirmasi kesediaan dan mengirim registration form (yang telah disampaikan dalam email melalui milis kri & krci sebelumnya) via email atau FAX No. 031-5946114, paling lambat 27 Agustus 2008.
Demikian undangan kami.
Wassalaamu Alaikum,
Endra Pitowarno
General Chair - Steering Committee IJE Robocon 2008
Sensor Proximity untuk Line Tracer
Author: DADHANG BUDHIARTO Sensor proximity adalah sensor untuk mendeteksi ada atau tidaknya suatu obyek. Dalam dunia robotika, sensor proximity seringkali digunakan untuk mendeteksi ada atau tidaknya suatu garis pembimbing gerak robot atau lebiah dikenal dengan istilah “Line Follower Robot “ atau “ Line Tracer Robot”, juga biasa digunakan untuk mendeteksi penghalang berupa dinding atau penghalang lain pada Robot Avoider. Jenis sensor proximity meliputi limit switch (saklar mekanik), ultrasonic proximity, proximity(infra merah), kamera dan lain sebagainya.

Sensor proximity yang digunakan untuk line follower robot dibuat menggunakan pasangan LED / Infrared dan phototransistor. Bila cahaya LED memantul pada garis dan diterima oleh basis phototransistor maka phototransistor menjadi saturasi(on)sehingga tegangan output akan mendekati 0 volt. Sebaliknya jika tidak terdapat pantulan maka basis phototransistor tidak mendapat arus bias sehingga menjadi cut-off, dengan demikian tegangan output sama dengan tegangan Induk (Vcc). Output rangkaian masih memiliki kemungkinan tidak pada kondisi ideal bila intensitas pantulan cahaya LED pada garis lemah, misalnya karena perubahan warna atau lintasan yang kotor. Untuk mengatasi hal tersebut ditambahkan rangkaian pembanding yang membandingkan output sensor dengan suatu tegangan threshold yang dapat diatur dengan memutar trimmer potensio. Untuk mengetahui hasil dari sensor, alangkah baiknya diberi lampu indicator yang disambungkan dengan output dari komparator.

Tidak ada komentar:
Posting Komentar